
jueves, 31 de marzo de 2011
sábado, 5 de marzo de 2011
Construcción Robot Sumo II (chasis y parte mecánica)
El diseño del chasis empezó sobre una base de madera, cuadrada de 20x20 cm, para cumplir así la normativa de la modalidad 3kg.













Hemos recortado los huecos para las ruedas y taladrado los agujeros para los soportes de los motores.
Marcamos donde van los soportes de los motores, los taladros y los CNY70.


Para la nueva versión del chasis hemos utilizado una mezcla de 2 maderas diferentes, pegadas entre sí, para dar mas dureza y flexibilidad. Las capas oscuras son madera DM de 3mm, y la de color más clara es madera de natural. La madera de la rigidez y dureza, mientras el DM es muy flexible y no se desmorona. El DM tiene un acabado plástico.
  |
4 perforaciones para los CNY70 en las esquinas y dos suplementos o plantillas para los soportes de los motores para que el suelo del robot esté más bajo. Están pegados con pegamento de contacto y luego taladrados.
|
 |
| Soporte blanco es para sujetar el puente H que controla los motores. |
 |
| Soportes de los motores colocados y dos escuadras detrás para sujetar la batería de los motores. |
 |
| parte inferior: |

 |
| motores, ruedas, batería y puente montados. |

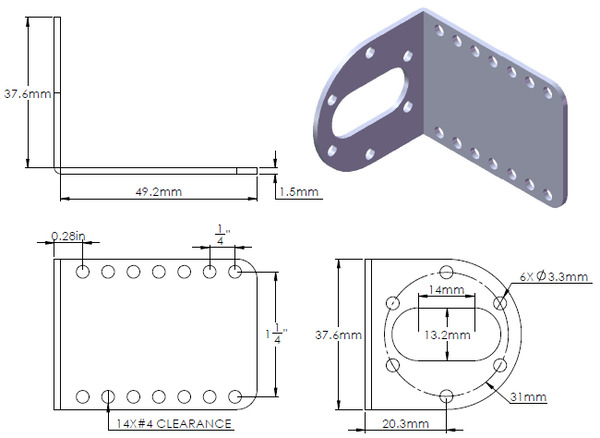
Aunque la idea es, en un futuro, fabricar la base de una lámina de metal, que controlando los espesores y densidades ... intentar ajustar el peso del robot para que llegue casi a 3 kg sin poner casi lastre. De esta manera a parte de ganar espacio y aumentar la compacidad y que el centro de gravedad queda muy bajo.
El chasis que recubre está hecho con una lámina muy fina de metal, 1mm , con un armazón de madera fina. La lámina de metal dobla y sujeta la madera, de manera que se le puede dar la forma que se desee. El conjunto está pegado con pegamento de contacto y, para que coja más rigidez, reforzado con escuadras y pegamento epoxi en los dobleces.
El proceso de pegado:



Vista frontal:


Lateral:


Ver también SUMO para más información.
Construcción Robot Sumo I (microcontroladora)
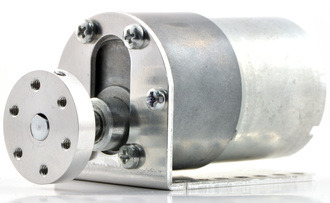
Como cerebro de nuestro robot sumo hemos usado una placa Arduino Mega con un ATmega1280 (datasheet), cuyas principales características son:


| Microcontroller | ATmega1280 |
| Operating Voltage | 5V |
| Input Voltage (recommended) | 7-12V |
| Input Voltage (limits) | 6-20V |
| Digital I/O Pins | 54 (of which 14 provide PWM output) |
| Analog Input Pins | 16 |
| DC Current per I/O Pin | 40 mA |
| DC Current for 3.3V Pin | 50 mA |
| Flash Memory | 128 KB of which 4 KB used by bootloader |
| SRAM | 8 KB |
| EEPROM | 4 KB |
| Clock Speed | 16 MHz |
He elegido Arduino por que estaba acostumbrado a usarla y por facilidad de usar una placa comercial, (no empezar de cero) y por comodidad respecto al software a usar. El micro ATmega1280 lleva 6 interrupciones, que nos vendrá bien para la lectura de los sensores de línea.
Las entradas/salidas que va a llevar el Sumo son:
- 4 sensores de distancia de infrarojos en lectura analógica.
- 4 sensores de línea en digital en los pines de interupciones.
- 4 entradas digitales para los enconders (2 cada motor).
- comunicación Serial con el puente H.
- 5 botones.
- 4 leds.
- un altavoz.
Para el conexionado de los sensores vamos a fabricar una placa o "shield" que se conecte a Arduino y salgan de aquí todos los conectores a los periféricos.
El esquemático (realizado con eagle) es:

La board se puede ver aquí y los archivos de eagle los subiré aquí en unos días....
Ver también SUMO para más información.
viernes, 4 de marzo de 2011
Ruedas para Robot de Sumo. Tutorial (IV)
El proceso que he realizado el casting ('fundición') de las ruedas para un robot de sumo.
Primero lubricar el molde para así poder extraer la rueda con más facilidad. Yo he usado vaselina pura, aunque creo que debe haber mejores opciones.

Aquí está el molde, de forma cilíndrica. Están dimensionadas para conseguir un espesor de goma de 5mm.


La llanta dela rueda le hemos puesto un tornillo de métrica 6 para centrar la rueda.

Hemos colocado una arandela grande para evitar que entre la goma líquida al interior de la llanta.

Insertamos la llanta con el tornillo en el molde y centramos.





Mezclamos los productos A y B con la relación 1:1. Calculamos antes el volumen de goma que necesitamos y lo dividimos entre 2 para coger esa cantidad de cada componente.

yo he cogido 12,5 ml (aprox)

Dejamos secar la rueda. En 24h está listo, pero en caso de ser necesario con 12h lo podemos desmoldar y dejar secar al aire.

Resultado final

véase también: Ruedas Sumo II, Ruedas Sumo III, Ruedas Sumo III
Suscribirse a:
Comentarios (Atom)