El diseño del chasis empezó sobre una base de madera, cuadrada de 20x20 cm, para cumplir así la normativa de la modalidad 3kg.













Hemos recortado los huecos para las ruedas y taladrado los agujeros para los soportes de los motores.
Marcamos donde van los soportes de los motores, los taladros y los CNY70.


Para la nueva versión del chasis hemos utilizado una mezcla de 2 maderas diferentes, pegadas entre sí, para dar mas dureza y flexibilidad. Las capas oscuras son madera DM de 3mm, y la de color más clara es madera de natural. La madera de la rigidez y dureza, mientras el DM es muy flexible y no se desmorona. El DM tiene un acabado plástico.
  |
4 perforaciones para los CNY70 en las esquinas y dos suplementos o plantillas para los soportes de los motores para que el suelo del robot esté más bajo. Están pegados con pegamento de contacto y luego taladrados.
|
 |
| Soporte blanco es para sujetar el puente H que controla los motores. |
 |
| Soportes de los motores colocados y dos escuadras detrás para sujetar la batería de los motores. |
 |
| parte inferior: |

 |
| motores, ruedas, batería y puente montados. |

Aunque la idea es, en un futuro, fabricar la base de una lámina de metal, que controlando los espesores y densidades ... intentar ajustar el peso del robot para que llegue casi a 3 kg sin poner casi lastre. De esta manera a parte de ganar espacio y aumentar la compacidad y que el centro de gravedad queda muy bajo.
El chasis que recubre está hecho con una lámina muy fina de metal, 1mm , con un armazón de madera fina. La lámina de metal dobla y sujeta la madera, de manera que se le puede dar la forma que se desee. El conjunto está pegado con pegamento de contacto y, para que coja más rigidez, reforzado con escuadras y pegamento epoxi en los dobleces.
El proceso de pegado:



Vista frontal:


Lateral:


Ver también SUMO para más información.
Me explicarias los que es un puente H estoy haciendo un Sumo Robot y todabia no estoy mucho con la eletronica
ResponderEliminarBuenas, pues un puente H básicamente es un circuito que sirve para controlar principalmente motores. Normalmente un Puente en H controla dos motores bidireccionales. El más conocido es el L293. Puedes encontrar en internet mucha información sobre el tema de control de motores. 1 Saludo!
Eliminarhttp://diebotreise.blogspot.de/2011/05/puente-h-qik-2s12v10-dual-serial-de.html
EliminarBuenas, pues un puente H básicamente es un circuito que sirve para controlar principalmente motores. Normalmente un Puente en H controla dos motores bidireccionales. El más conocido es el L293. Puedes encontrar en internet mucha información sobre el tema de control de motores. 1 Saludo!
ResponderEliminarbuenas, que usaste como rueda o llanta
ResponderEliminarEntra en http://diebotreise.blogspot.com/p/robot-de-sumo.html y en la parte de ruedas está todo explicado.
ResponderEliminarLas llantas están hechas de un aluminio y mandadas a fabricar en un taller, los tamaños están en la página anterior.
1 saludo.Alberto.
que batería estas usando?? cual es su nombre
ResponderEliminarBaterías de Lipo de 4S (4 celdas) y la capacidad tienes que calcularla a partir de tu consumo de motores, y el tiempo de autonomía deseado... Yo creo que usé de alrededor 4000mAh.
Eliminar1 saludo!
que motores estas usando?? y que bateria?
ResponderEliminarBaterías de Lipo de 4S (4 celdas) y la capacidad tienes que calcularla a partir de tu consumo de motores, y el tiempo de autonomía deseado... Yo creo que usé de alrededor 4000mAh.
Eliminar1 saludo!
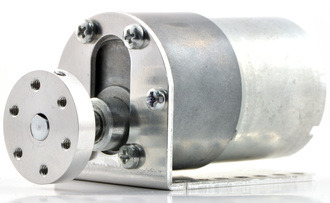
Los motores: 50:1 Metal Gearmotor 37DX54L he usado dos con encoders y dos sin encoders. Aunque no son estrictamente necesarios los encoders, Sólo para saber la distancia exacta recorrida o la velocidad en cada momento.
EliminarHola Amigo quisiera saber si me puedes vender ese mini sumo necesito uno de Urgencia.. saludos
ResponderEliminarBuenas, negativo, el robot fue parte de un proyecto de la universidad, asi que lo tienen ellos...
Eliminar