D }
Actualmente estoy usando este
 Puente H
Puente H, que considero bastante potente y tras 2 años de uso para motores de potencia media (hasta 30A de pico y 13A en continuo) no ha saltado todavía. El precio son unos 85 dólares mas envío.
Datasheet-user guide.
Empecemos por unas breves pinceladas sobre lo que es un
"puente en H", es la etapa intermedia entre el elemento de control o microprocesador y los motores. Es una etapa en la que a partir de las señales que manda el controlador se consigue la potencia necesaria para accionar los motores. Es capaz de interpretar la información que le llega desde el controlador para convertirlo en señales que llegan directamente a los bornes de los motores.
Para que nos hagamos una idea, un microcontrolador es capaz de sacar unos 50mA y un motor de microrrobotica puede consumir desde 150mA hasta 2 o 5 amperios en pico. El circuito básico está formado por cuatro transistores, MOSFET o BJT. Aclarar que el nombre de puente H (H bridge) viene del dibujo del circuito original compuesta de 4 transistores MOSFET, en este caso.
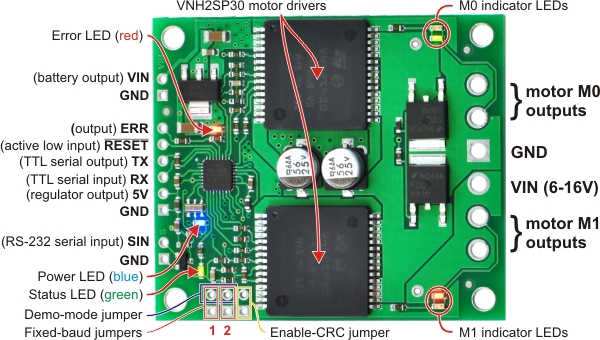
El pololu Qik 2s12v10 Dual Serial Motor Controller tiene la particularidad de que se controla a través de un puerto Serial, cuando lo más habitual es mandar señales PWM. Lo cual permite un mejor control sobre algunos factores como el control de la aceleración, limitación de corriente, feedback de errores y datos... Con un único cable (y la interconexión entre las tierras) podemos controlar velocidad y dirección.
Aclarar que todos los pines cuadrados corresponden a la masa (GND) y que NO se puede alimentar los motores desde el lado de baja tensión (izquierda), donde pone "battery output".
El conexionado necesario para los motores es:
Como podemos ver en la imagen es recomendable conectar 3 condensadores cerámicos de 0.1 uF por motor, para desacoplar picos pequeños.
El conexionado para fijar la velocidad la conexión Serial es cortocircuitar los jumpers 1 y 2. de esta manera trabajaríamos a una velocidad de 9600 bps. Si queremos usar el modo de auto-detección de la velocidad debemos "calibrar" mandando 0xAA (en hexadecimal). Para otras velocidades consultar la tabla en el
user guide.
Para conectar la placa Arduino con el puente conectamos el Tx (trasmisor) de Arduino al RX (receptor) del puente y viceversa. Desde el puente podemos recibir datos de configuración, de diagnostico de errores, intensidades, velocidades ...
El protocolo básico que se usa en este tipo de puente lo encontramos en la siguiente imagen. Para enviar el código desde Arduino, como ya veremos más adelante, basta con escribir la siguiente línea de código.






No hay comentarios:
Publicar un comentario