Componentes nuevo robot de sumo:

Pololu Qik 2s12v10 Dual Serial Motor Controller
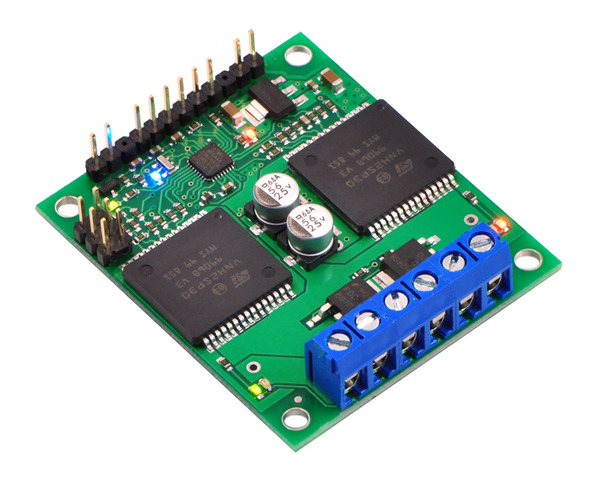
| Pololu item #: 1112 (2 unidades) ( si hay presupuesto suficiente 3 unidades) |
Pololu Universal Aluminum Mounting Hub for 6mm Shaft Pair, 4-40 Holes

| Pololu item #: 1083 (3unidades) unas de repuesto. Ya que son de métrica imperial y es difícil de encontrar en España. Los del robot viejo están algo desgastados. Hex (Allen) Wrench 0.05" |

| Pololu item #: 1064 (2 unidad) |
Pololu 37D mm Metal Gearmotor Bracket Pair
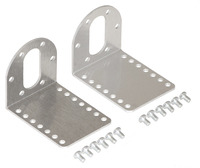
| Pololu item #: 1084 |
50:1 Metal Gearmotor 37Dx54L mm

| Pololu item #: 1104 |
(3 unidades)
Tienen más reductora que los anteriores (50:1) por lo que van más rápido y tienen menos torque. Al poner sólo dos motores estamos intentando ganar velocidad y movilidad perdiendo fuerza. Para ganar un poco más de velocidad. Vamos a aumentar el tamaño de las ruedas.
Tampoco hemos añadido encoders, ya que ganamos espacio (a lo ancho) y podemos usar una profundidad de rueda más grande, alrededor de 25 milímetros frente a los 20 milimetros usando encoders.
Usaremos el mismo ratio (50:1) que los antiguos, para así aprovechar el motor que tenemos de repuesto para que sirva para los dos.
Usaremos el mismo ratio (50:1) que los antiguos, para así aprovechar el motor que tenemos de repuesto para que sirva para los dos.
 |
| espacio que ganamos al quitar los encoders |
Propuesta para talleres:


| Pololu item #: 114 |
| Pololu item #: 64 3.60 dolares cada par de ruedas 9.25 dolares cada par de motores total= 1285 dolares (más envío)
Se pueden crear pequeños robots junto a un pequeño control y un L298
por ejemplo, de bajo coste.
|

TEXAS INSTRUMENTS - LM2901D. - COMPARADOR
CUÁDRUPLE, SMD, 2901, SOIC14
1648673
VISHAY SILICONIX - CNY70 - SENSOR, ÓPTICO,
TRANSISTOR O/P
código Farnell: 1470063
SHARP - GP2Y0D02YK0F - SENSOR, DISTANCIA,
O/P DIGITAL

Código Farnell: 9707905
SHARP - GP2Y0A02YK0F - SENSOR, DISTANCIA, O/P, ANALÓGICO
Código farnell: GP2Y0A02YK0F
para completar el robot actual, así sólo usamos analógicos en uno y digitales en otro.
(1 unidad)
conectores:
La última compra de conectores fue un desastre, no funcionan bien, o no encajan
machos y hembras o se rompen al sacarlo mas de 5 veces
electrónica varia
Componentes pasivos.

Taller mecánico UPCT
Construcción de Ruedas en el taller mecánico. Podemos fabricar unas parecidas a las
anteriores pero algo más grandes. Las anteriores tenían 45 mm de diámetro de llanta,
estas se pueden hacer de 50 o 55.. Usar el mismo diseño.
No hay comentarios:
Publicar un comentario